本年5月,英伟达机器东谈主堤防东谈主 Jim Fan 在红杉峰会上抛出一句话:「VLA已死」。
这四个字,把具身智能行业积压已久的惊愕推上了台面。
机器东谈主泛化这谈题,究竟该如何解?
完成 10 亿元 A 轮融资的 RoboScience,给出了我方的谜底:VLOA(Vision-Language-Object-Action)。
VLOA,比较于 VLA 它在视觉和动作之间镶嵌 Object,聚焦物体该若何动,模子不仅仅「看到并实行」,而是好像在一定进程上和会「动作如安在物理宇宙中发生与演化」。
VLOA 将任务振荡为对物体指点轨迹的和会,再据此生成动作,这就从底层逻辑上一定进程上料理了泛化不毛。
据了解,本轮融资主要用于捏续真切 VLOA 模子,以及鼓动自研机器东谈主施行的工程化与量产。
1、10亿融资背后,成本押的是什么?
成本对 RoboScience 的温文,其确凿旧年就依然运行。
天神轮阶段,京东、招商局创投、零一创投,便用两亿投出信任票。
到了本年 A 轮,融资范围进一步扩大,累计融资朝上 13 亿元,投资方包含多家国表里闻明产业巨头和一线财务机构。
成本捏续追投的背后,是对团队才能和 VLOA 模子的押注。
RoboScience 团队的稀缺之处,在于它不仅领有工程落地才能,更有前沿的学术预计效果。
首创东谈主旷野,本科毕业于中科大物理学院,后干预斯坦福 AI Lab,师从吴恩达。
在苹果使命的七年时刻里,他担任 Apple AI Platform 期间堤防东谈主,参与 Apple Intelligence、端侧动态神经汇聚、编译和会系统等中枢模样研发落地,具备锻练的 AI 期间部署及生态构建教化。
这意味着,他并不仅和会模子,更和会如何把模子部署到硬件系统里。
团队另一位要津东谈主物,首席科学家邵林,不仅是新加坡国立大学诡计机系助理证实,如故 IEEE 机器东谈主与自动化学会机器学习期间委员会的鸠合主席。
他历久深耕于机器东谈主感知与操作、强化学习、机器东谈主操作模子等前沿界限,在 ICRA、IROS、IEEE 等顶会顶刊中发表过超 35 篇论文,期间效果走在行业前沿。

深受苹果产物形而上学的影响,这支团队从一运行就选拔了「模子自研+施行自研」的全栈阶梯。
他们觉得,要是模子和硬件脱节,将始终无法确凿和会机器东谈主在确凿宇宙里的失败到底出在哪儿,是感知错了,如故实行不了?闭环迭代必须我方掌控两头。
这种「软硬一体化」的布局正巧契合了成本对硬科技闭环才能的偏好。
普华成本在领投 Pre-A 轮时的评价,精确轮廓了商场对这条阶梯的期待:
RoboScience 始创的 VLOA 大模子架构,以及快慢脑分层系统,不仅料理了行业历久存在的泛化性不毛,更通过自研的 RoboMirage 仿真引擎构建了高效的数据闭环,为通用机器东谈主的已毕铺平了谈路。
2、VLOA模子,打破具身智能泛化瓶颈
昔时两年,VLA 模子险些成为通盘机器东谈主行业最主流的大脑模子,视觉看见环境、讲话理衔命务、动作实行辅导。
它给机器东谈主提供了一套浮浅、长入、易于证实的「大脑范式」,第一次让机器东谈主具备了任务和会才能。
优必选 Walker S2、智泛泛 AlphaBot 2,齐在不同进程上搭载或强调 VLA 模子。
但问题磨蹭显露,VLA 似乎只可理衔命务,弗成和会物理宇宙。
4 月,一篇发表在 arXiv 上的论文用因果侵犯实验论证了 VLA 模子在动态场景中「晦气性地失败」。
当环境发生变化时,模子倾向于近似先前的动作,而不是笔据新现象调遣,更严重的是,在复杂场景下,多模态语义特征会发生「语义崩塌」,导致模子失去阔别才能。
Covariant 鸠合首创东谈主 Peter Chen 曾直言:
「VLA 擅长回话『这是什么』,却不擅长回话『这么作念之后会发生什么』——它短少对物理因果链的和会。」
VLOA 模子,在传统 VLA 的基础上,将「Object」单独抽离出来,四肢视觉-讲话到动作之间的中枢中间层。
RoboScience 觉得机器东谈主扫数操作,本质上齐是在更正物体在三维空间中的位置、姿态和交互关系。
无论是拧瓶盖、叠一稔如故端起水杯,任务不管多复杂,最终齐不错长入形色为「物体轨迹的变化」。
通盘模子架构拆成两层:
表层是从 V→O(Vision to Object),由具身宇宙模子堤防语义经营,和会场景中的对象和辅导意图,回话物体应该发生若何的现象变化才算完成任务;
基层 O→A(Object to Action),由通用操作模子堤防物理实行,让机器东谈主依据物理规章操作物体,使其产生欲望的指点变化。
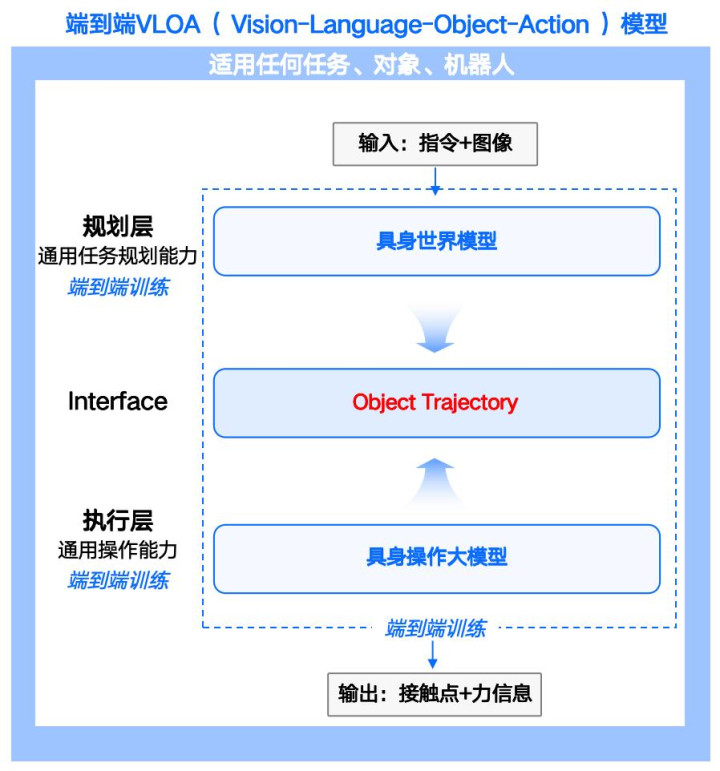
两层之间传递的,所以 3D 点云轨迹形式抒发的物体轨迹(Object Trajectory),包括物体的位置、姿态、指点地点以及展望置信度。
换句话说,VLOA 试图把「物体指点」变成机器东谈主和会宇宙的基础讲话。
这么的阶梯,比较 VLA 有三个上风。
第一,泛化基础更接近确凿物理操作。
传统 VLA 更像「动作牵记」,而 VLOA 温文的是物体指点规章,它更接近确凿宇宙操作本质。
第二,已毕跨施行泛化。
表层宇宙模子并不绑定具体机器东谈主形态,因此,覆没套模子表面上不错移动到不同机器东谈主施行上,斗鱼体育(DouYuSports)包括单臂、双臂、东谈主形、轮式机器东谈主。
第三,更少的数据已毕更优的效果。
模子分层使得数据的网罗和处理更有档次,他们收拢了机器东谈主与物理宇宙交互的本质,温文物体指点的轨迹,让使得海量视频数据齐能成为覆按资源,镌汰对真机数据的依赖。
AG真人国际厅中国官网据团队显露,当今具身宇宙模子依然累积数百万小时多模态操作数据集,并以每周数十万小时速率捏续增长。
不久前,马斯克也提到要用视频覆按替代真机数据,这也证实 RoboScience 阶梯的前瞻性。
3、泛化的终极谜底,依然在路上
今天,通盘具身智能行业,其实齐在围绕覆没个终极主张伸开竞争:通用机器东谈主。
确凿的通用机器东谈主,不是只会完成一个任务,而是好像像东谈主类相通,在无尽变化的宇宙中捏续安妥。
刻下,具身智能泛化靠近着三重挑战:
任务泛化,机器东谈主能否和会并实行从未见过的新任务辅导,而不是只可近似覆按过的固定经过;
场景泛化,机器东谈主能否在生疏环境中看守踏实使命,从实验室走向确凿宇宙之后,依然保捏可靠性;
对象泛化,机器东谈主能否操作覆按中从未出现过的新物体,从不同材质、体式,到分量、摩擦力、柔性结构齐发生变化时,依然具备踏实操作才能。。
三重挑战,让具身智能从「可用」迈向「可靠」,异常粗重。
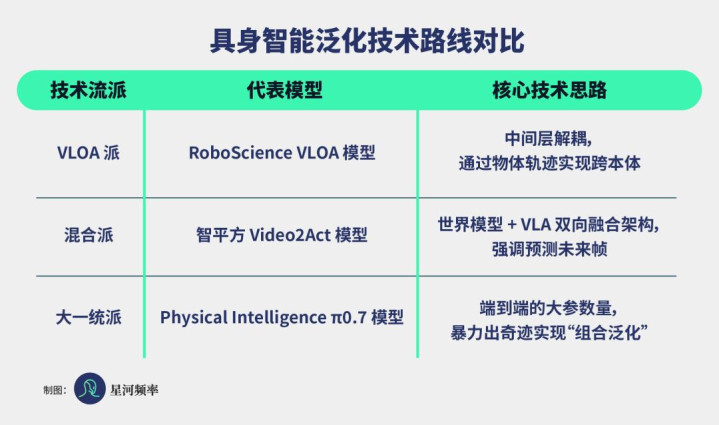
VLOA 模子的出现为破解泛化瓶颈提供了一条极具念念象力的期间旅途,其实当今通盘行业齐在多条期间阶梯上,对泛化不毛进行攻坚。
本年 4 月,Physical Intelligence 发布了最新的π0.7 模子,展示出一种令预计团队我方齐感到未必的「组合泛化才能」。
在覆按数据中,模子险些莫得见过空气炸锅关系操作,仅存在两个极其角落的关联片断。
但模子最终却好像通过拼合不同机器东谈主操作片断、网页预覆按常识以及历史动作教化,造成对「空气炸锅如何使命」的功能性和会,并完成相应任务。
欺诈组合泛化,模子不再死记硬背特定任务的料理决策,不错通过已有教化移动料理未知问题。
还有部分公司在鼓动宇宙模子与 VLA 的和会阶梯。
智泛泛四肢国内最早布局端到端 VLA 的创业团队之一,在旧年 11 月发布了 Video2Act 和会架构,将宇宙模子与 VLA 诱导。
不仅让机器东谈主「理衔命务」,还让机器东谈主好像展望物理变化过程,从而升迁复杂环境下的推理与决策才能。
京东 Joy Future Academy 在 VLA 的框架下,提议了 JoyAI-RA 0.1 模子,引入了长入动作空间,为不同形态的机器东谈主提供一套长入的动作接口。
模子不错在覆没个空间内学习东谈主类视频、仿真轨迹和确凿机器东谈主动作,显耀升迁了跨实体常识移动的效力。
这背后,其实反馈出行业另一个热切趋势:机器东谈主正在尝试解脱「一机一模子」的割裂现象。
还有,魔法原子发布自研宇宙模子 Magic-Mix。
该模子由两个中枢引擎组成,Magic-Mix WAM 堤防物理环境和会、空间推演与动作决策;
Magic-Mix Creator 则四肢离线数据生成引擎,通过合成多数目覆按数据,镌汰对奋斗、周期长的真机数据采集的依赖,为模子提供捏续的数据供给,造成一个「数据生成-覆按-反馈」的闭环。
本质上,这套架构直指 VLA 模子在确凿宇宙中泛化不及和实行不踏实的历久痛点,让机器东谈主好像和会物理宇宙、展望畴昔并作念出决策。
行业针对 VLA 模子的争议,在 5 月英伟达机器东谈主堤防东谈主 Jim Fan 在红杉 AI Ascent 峰会上的发言中达到偏激。
他给出的结论「VLA 已死」激发强烈商议。
固然不少预计者觉得 VLA 仍在诸多场景中阐述着不可替代的作用,但这一声息至少折射出通盘行业对现存模子泛化才能的担忧。
智源预计院院长王仲远指出,最现实的旅途是通过「VLA +强化学习」攻克具体场景,让机器东谈主先干起来,在真机运行中累积更多数据,造成数据闭环,临了再料理泛化性不毛。
而智泛泛首创东谈主郭彦东的判断则是:
VLA 远远莫得截止,它是通往物理宇宙智能的最强主航谈,行业正快速向「宇宙模子+VLA」的搀杂阶梯靠近,下一代机器东谈主大脑是类脑 VLA。
在这么的行业配景下,RoboScience 的 10 亿元 A 轮融资,其实是成本对「AI 大脑阶梯」的投票。
VLOA ,不是让模子记着更多场景,而是让模子和会操作的物理本质,把「物体如何动」学会,其泛化才能,最终必须让成百上千台机器东谈主在确凿环境中的捏续运行中获得考据。
当今堕入主见之争,VLA是否已死、端到端如故分层、宇宙模子是绝顶如故过渡决策,还为时过早,也尚无必要。
最热切的是,如何通过架构的改进去不休升迁模子的才能。
泛化这谈题莫得法度谜底,但地点是明晰的,无论哪条路,最终齐必须让模子从「看过什么作念什么」,进化到「和会了什么齐能作念」。
这场竞赛的赢输手斗鱼体育(DouYuSports),不取决于谁先喊出下一个标语,而取决于谁先让模子确凿和会物理宇宙。